您正在阅读的是旧版本但仍受支持的 ROS 2 文档。 Jazzy.
使用 rqt_console 查看日志
目标 了解 rqt_console是一个用于反省日志信息的工具。
辅导水平: 初学者
时间 5 分钟
背景介绍
rqt_console 是一个 GUI 工具,用于反观 ROS 2 中的日志信息。使用 rqt_console此外,您还可以在一段时间内收集这些信息,以更有条理的方式仔细查看它们,过滤它们,保存它们,甚至重新加载保存的文件,以便在不同的时间进行反省。
节点使用日志以各种方式输出有关事件和状态的信息。它们的内容通常是信息,供用户参考。
先决条件
您需要 rqt_console 和 turtlesim 已安装。
与往常一样,别忘了在 您打开的每个新终端.
任务
1 设置
开始 rqt_console 在新终端中使用以下命令:
ros2 运行 rqt_console rqt_console
"(《世界人权宣言》) rqt_console 窗口将打开:
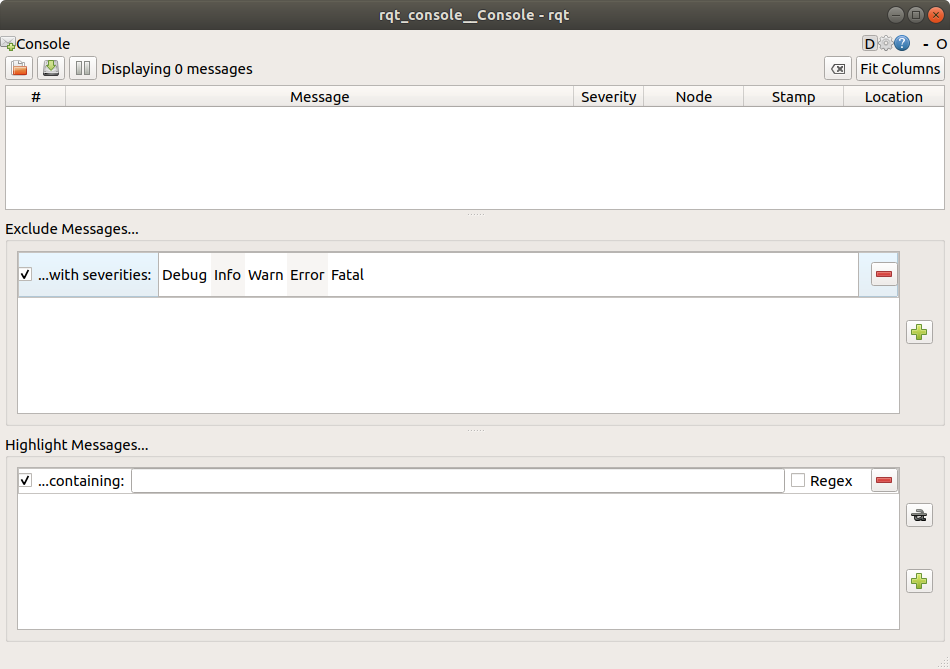
控制台的第一部分将显示系统的日志信息。
在中间,您可以选择按排除严重程度过滤邮件。您还可以使用右侧的加号按钮添加更多排除筛选器。
底部用于高亮显示包含您输入的字符串的邮件。您还可以在这部分添加更多筛选器。
现在开始 海龟 在新终端中使用以下命令:
ros2 运行 turtlesim turtlesim_node
2 条关于 rqt_console 的信息
要为 rqt_console 显示,让乌龟撞墙。在新终端中输入 玫瑰2 主题 酒吧 命令(在 主题教程)如下:
ros2 topic pub -r 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y:0.0, z: 0.0}, angular:{x: 0.0,y:0.0,z: 0.0}}";
由于上述命令以稳定的速度发布主题,乌龟会不断撞墙。在 rqt_console 您将看到与 警告 严重程度会反复显示,就像这样:
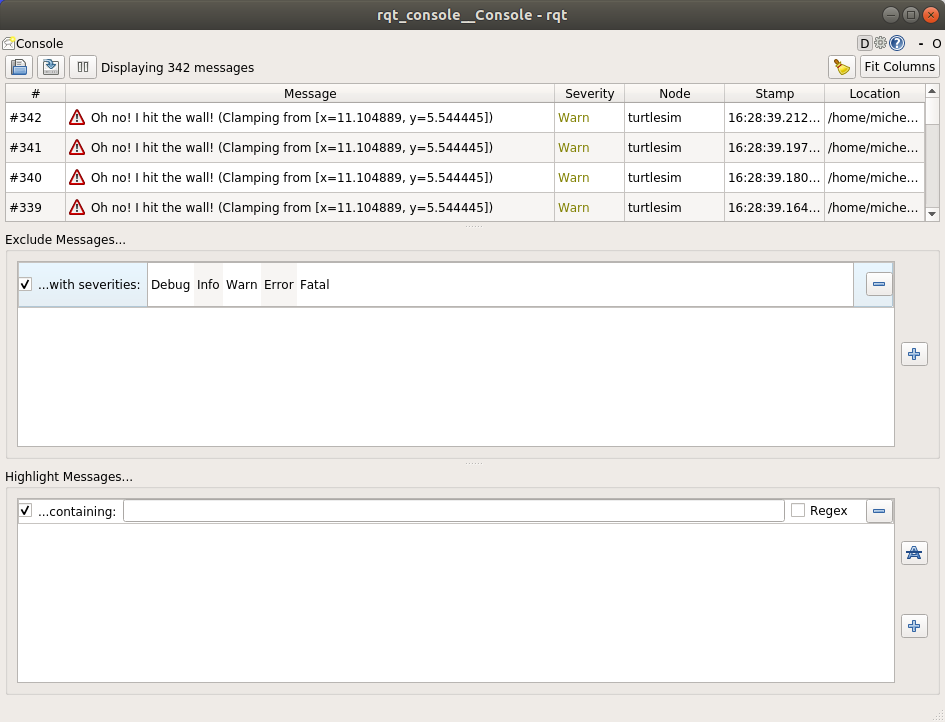
新闻 Ctrl+C 的终端中运行 玫瑰2 主题 酒吧 命令来阻止乌龟撞墙。
3 个记录仪级别
ROS 2 的记录仪级别按严重程度排序:
致命
错误
警告
信息
调试
虽然没有确切的标准来说明每个级别所代表的含义,但可以这么认为:
致命信息表明系统将终止运行,以保护自身免受损害。错误信息表明存在重大问题,不一定会损坏系统,但会妨碍系统正常运行。警告信息显示意外活动或非理想结果,可能代表更深层次的问题,但不会直接损害功能。信息信息显示事件和状态更新,可直观验证系统是否按预期运行。调试信息详细说明了系统执行的整个步骤过程。
默认级别为 信息.您只能看到默认严重性级别和更严重级别的信息。
通常情况下,只有 调试 信息被隐藏起来,因为它们是唯一比 信息.例如,如果将默认级别设置为 警告您只能看到严重程度为 警告, 错误和 致命.
3.1 设置默认记录仪级别
您可以在首次运行 /turtlesim 节点。在终端中输入以下命令
ros2 run turtlesim turtlesim_node --ros-args --log-level WARN
现在你看不到最初的 信息 控制台中出现的信息。 海龟.这是因为 信息 信息的优先级低于新的默认严重性、 警告.
摘要
rqt_console 如果你需要仔细检查系统的日志信息,那么它将会非常有用。您可能出于各种原因想要检查日志信息,通常是为了找出出错的地方以及导致出错的一系列事件。
下一步工作
下一个教程将教你如何使用 启动 ROS 2.