用 Foxglove Studio 可视化 ROS 2 数据
狐狸草工作室 是一款用于机器人数据的开源可视化和调试工具。
它可以以多种方式提供,以尽可能方便开发--它可以作为独立的桌面应用程序运行,也可以通过浏览器访问,甚至可以自行托管在自己的域名上。
查看源代码 GitHub.
安装
要使用网络应用程序,只需打开 Google Chrome 浏览器并导航至 studio.foxglove.dev.
要使用 Linux、macOS 或 Windows 版桌面应用程序,请直接从 狐狸草工作室网站.
连接到数据源
打开 Foxglove Studio 时,您会看到一个对话框,其中列出了 所有可能的数据源.
要连接到 ROS 2 堆栈,请单击 "打开连接",选择 "Rosbridge (ROS 1 & 2) "选项卡,然后配置 "WebSocket URL"。
您还可以拖放任何本地 ROS 2 .db3 文件直接载入应用程序进行播放。
备注
为了 在 ROS 2 文件中加载自定义消息定义,尝试将它们转换为 MCAP 文件格式.
查看 狐狸草工作室文档 获取更详细的说明。
带面板的建筑布局
面板 是模块化的可视化界面,可以配置和排列成 Studio 布局.您还可以保存您的布局,供个人或更大的机器人团队今后使用。
在侧边栏的 "添加面板 "选项卡中查看可用面板的完整列表。
下面我们将重点介绍一些特别有用的信息:
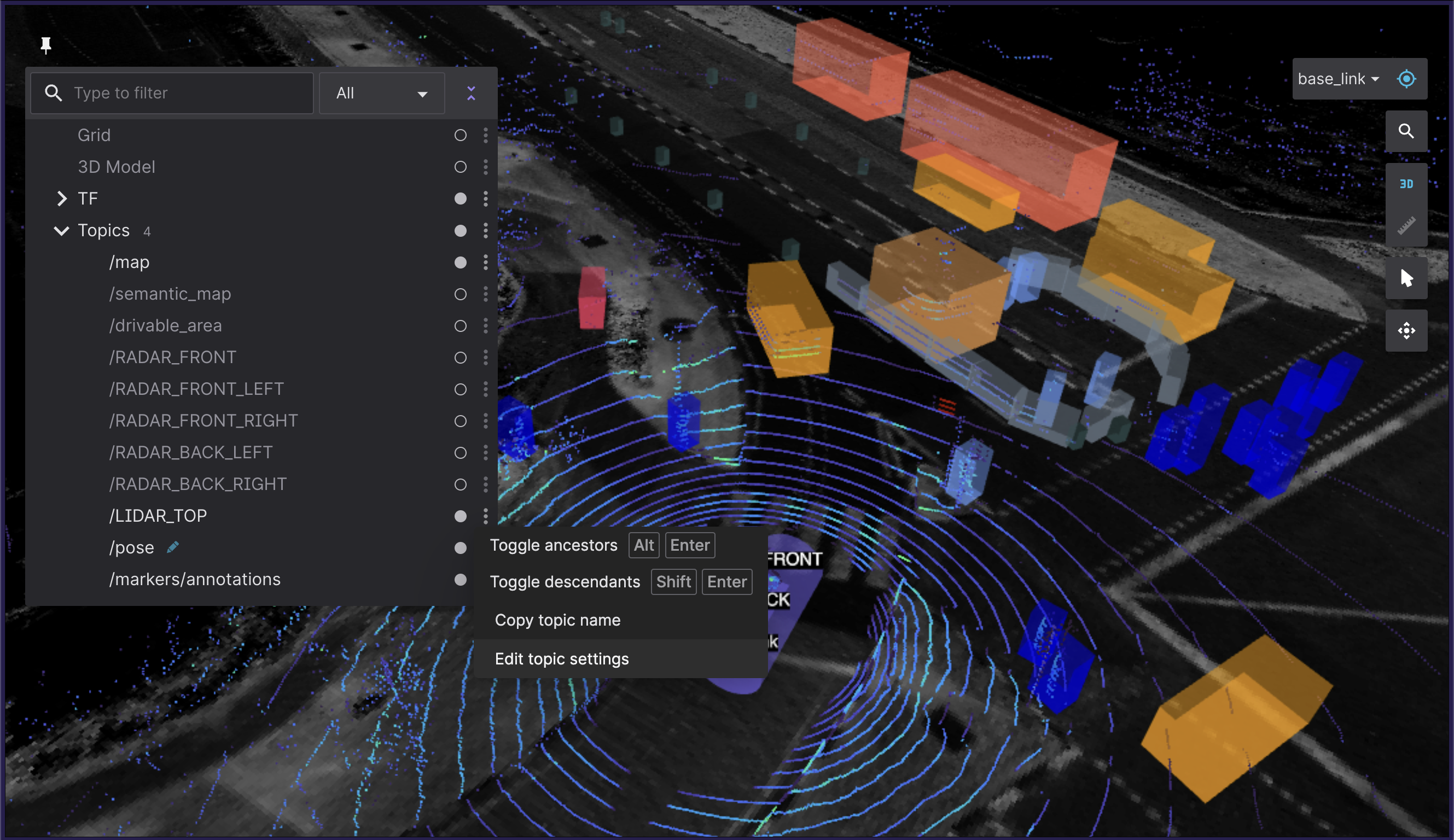
1 3D: 在 3D 场景中显示可视化标记
发布标记信息,将原始形状(箭头、球体等)和更复杂的可视化(占位网格、点云等)添加到 3D 面板场景中。
通过左侧的主题选择器选择要显示的主题,并在 "编辑主题设置 "菜单中配置每个主题的可视化设置。
2 诊断:过滤和分类诊断信息
显示主题中已查看节点的状态(即过期、错误、警告或确定),带 diagnostic_msgs/msg/DiagnosticArray 数据类型,并显示给定的诊断数据。 诊断名称/硬件 ID.
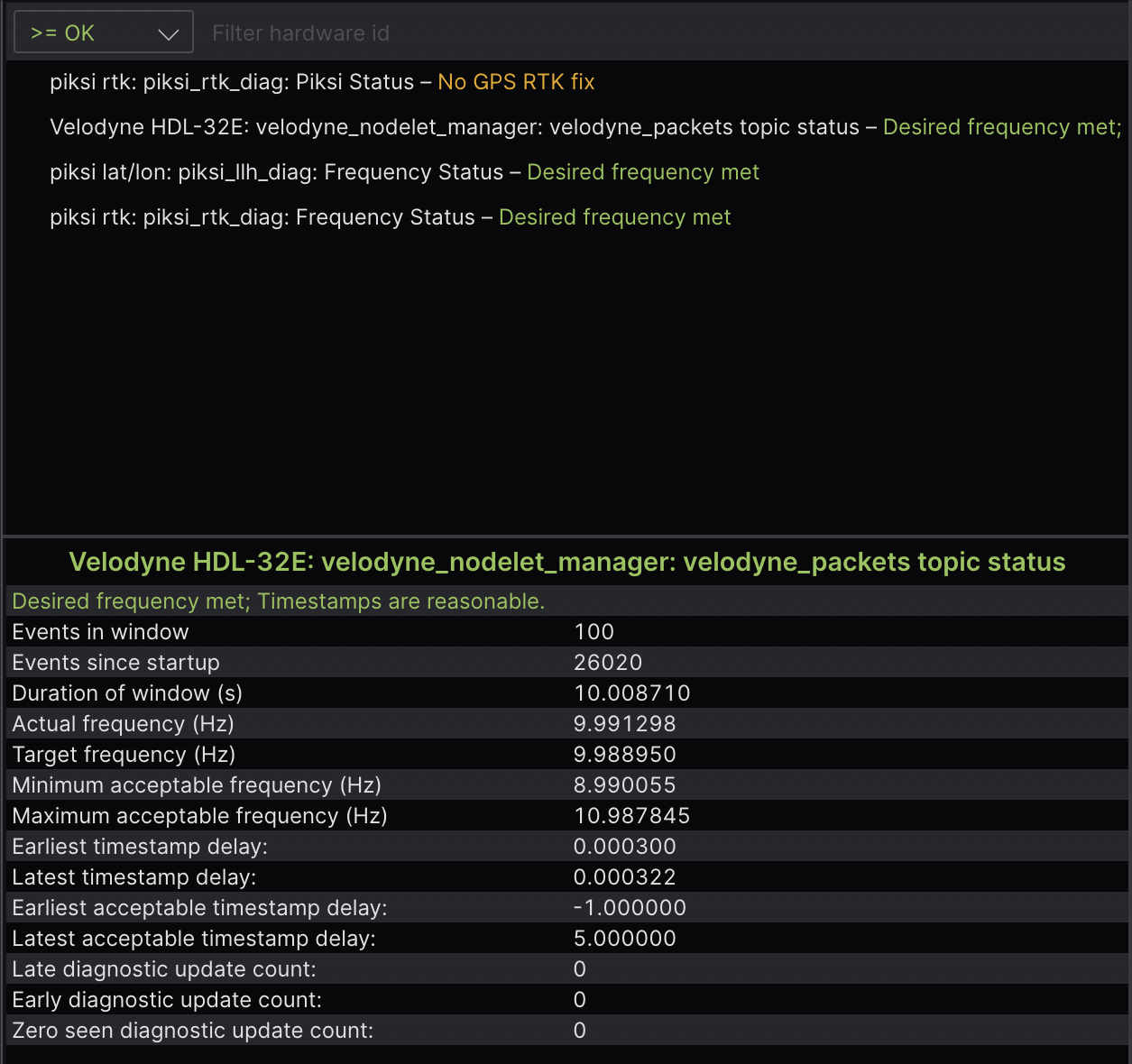
参考 文档 了解更多详情。
3 图像:查看摄像机图像
选择一个 传感器_msgs/msg/图像 或 传感器_msgs/msg/压缩图像 要显示的主题。

参考 文档 了解更多详情。
4 日志:查看日志信息
查看 rcl_interfaces/msg/Log 实时消息,使用桌面应用程序 接通 到正在运行的 ROS 堆栈中。查看 rcl_interfaces/msg/Log 从预先录制的数据文件中获取信息时,您可以将文件拖放到 网页 或桌面应用程序。
接下来,添加一个 日志 面板。如果正确连接了 ROS 堆栈,现在就能看到日志信息列表,并能按节点名称或严重程度进行过滤。
参考 文档 了解更多详情。
5 绘制: 绘制随时间变化的任意值
根据播放时间绘制主题信息路径中的任意值。
指定要沿 y 轴绘制的主题值。对于 x 轴,可选择绘制 y 轴值的时间戳、元素索引或其他自定义主题信息路径。
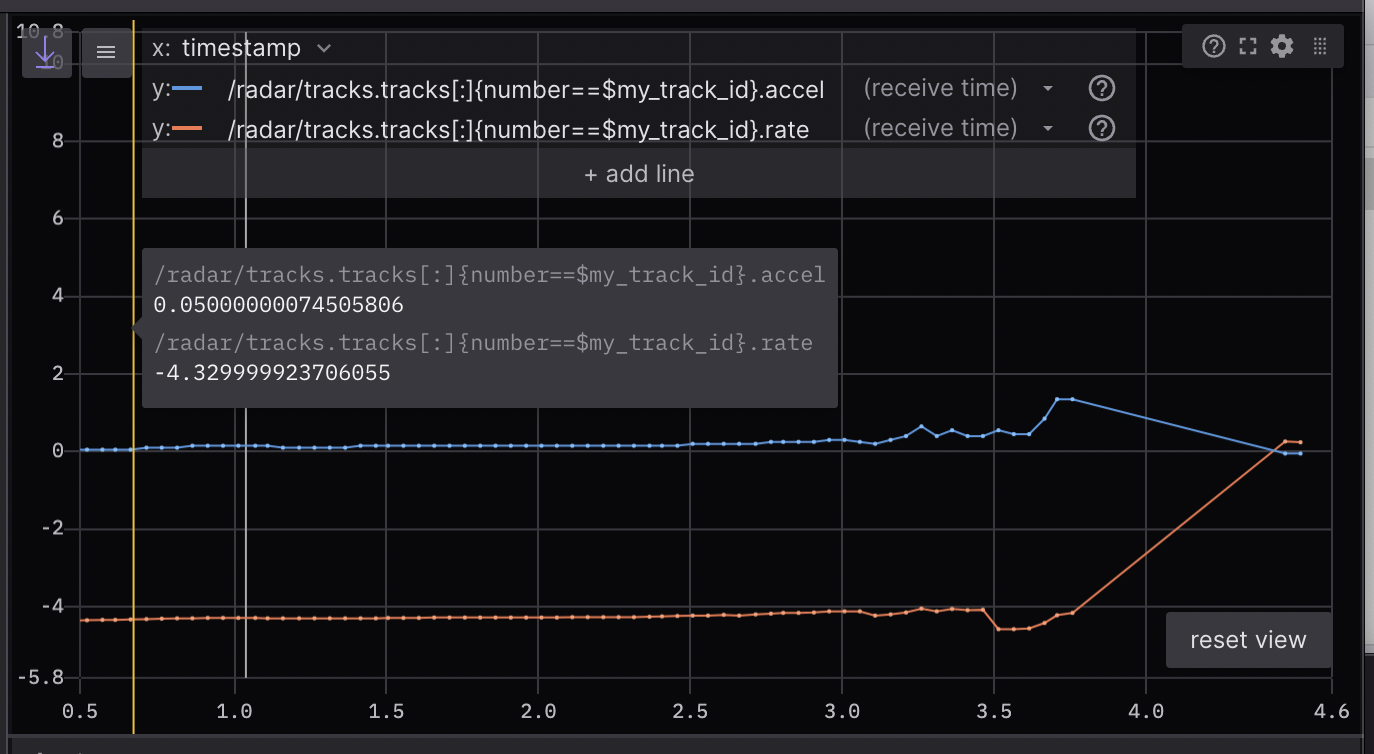
参考 文档 了解更多详情。
6 原始信息:查看收到的主题信息
以易于阅读的可折叠 JSON 树格式显示传入的主题数据。
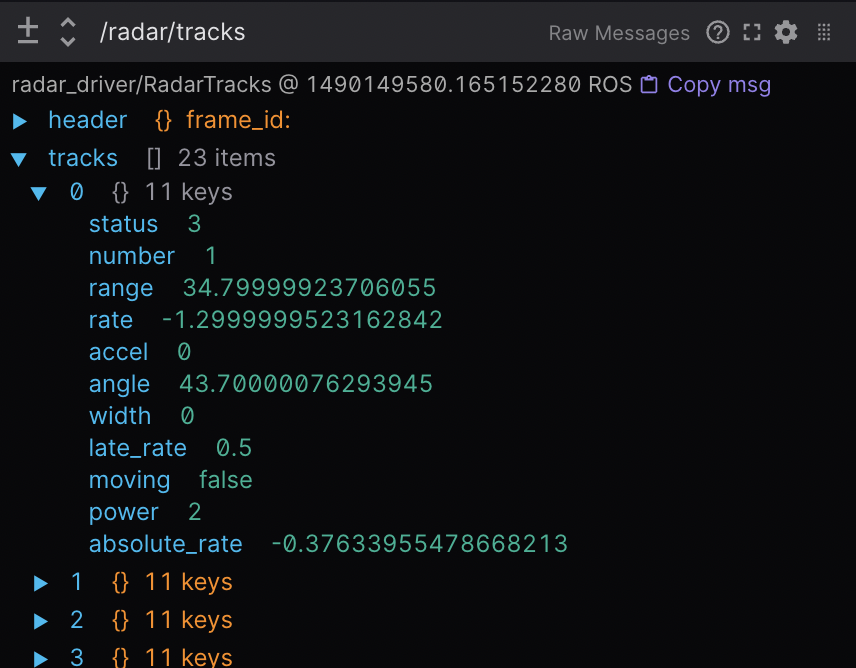
参考 文档 了解更多详情。
7 Teleop:远程操作机器人
通过发布远程操作物理机器人 geometry_msgs/msg/Twist 将给定主题的信息反馈回实时 ROS 堆栈。

参考 文档 了解更多详情。
8 URDF 查看器:查看和操作 URDF 模型
要在 Foxglove Studio 中可视化和控制机器人模型,请打开网络或桌面应用程序,然后添加一个 URDF 查看器 面板。然后,将 URDF 文件拖放到该面板中,就可以直观地看到机器人模型了。
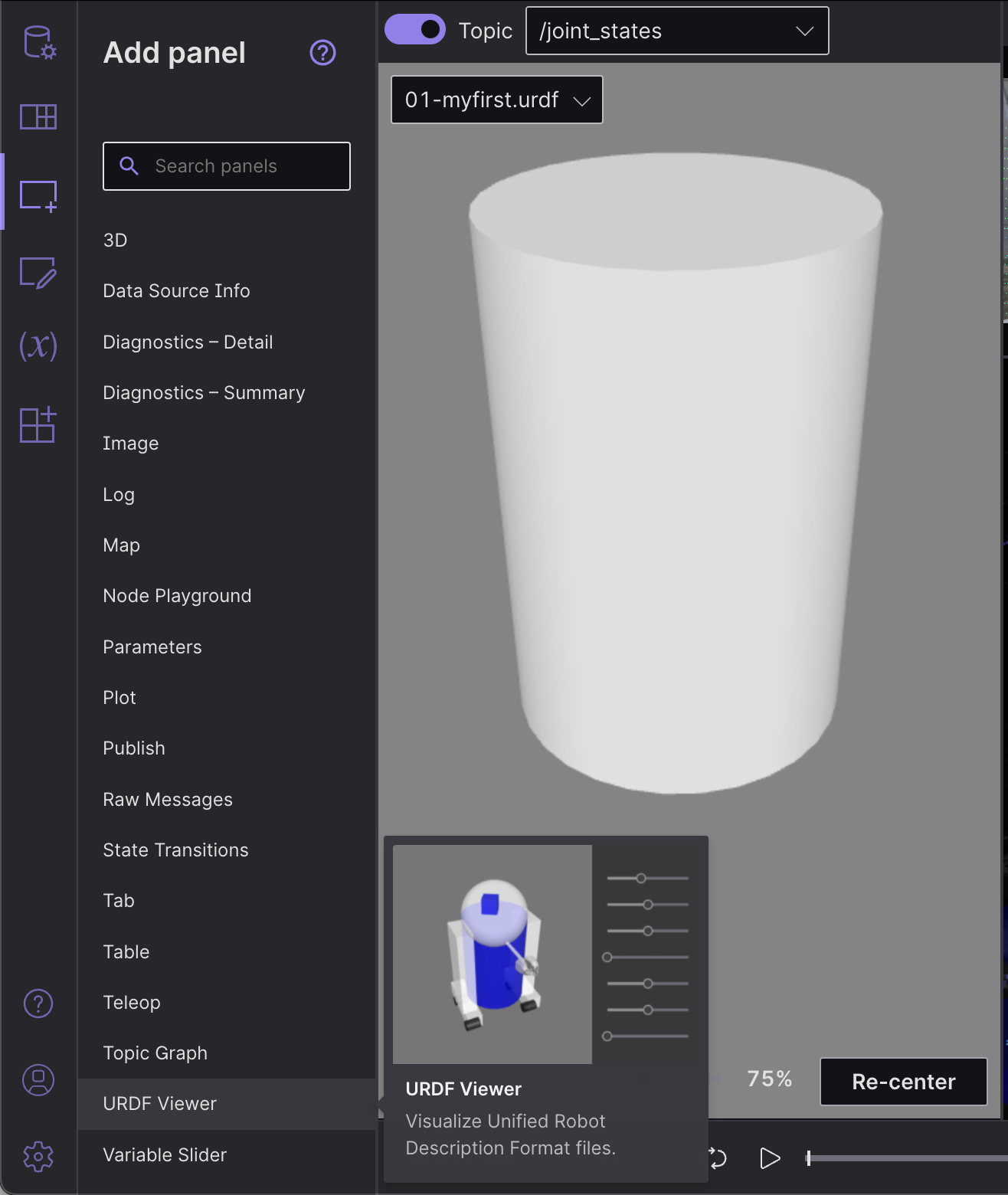
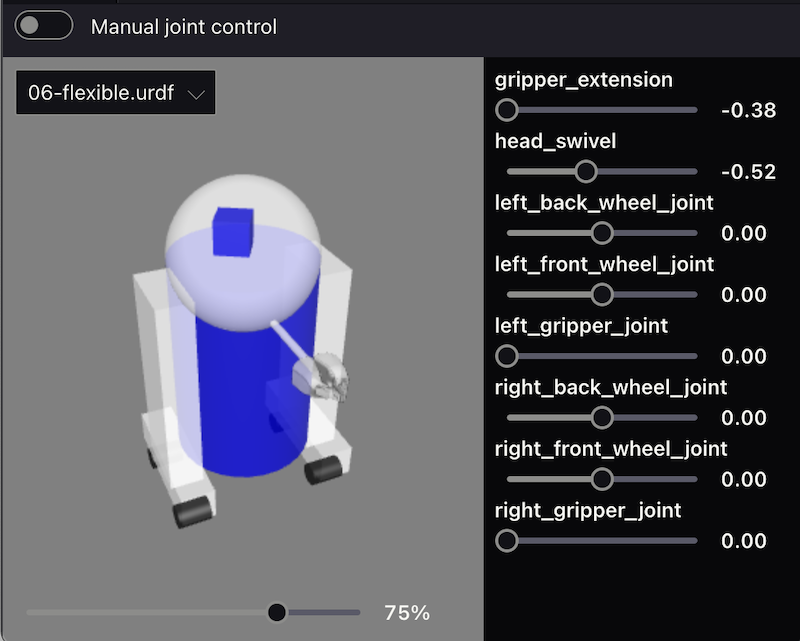
选择任何主题,发布一个 联合国家 消息,以根据发布的联合状态更新可视化效果(默认为 /joint_states).
切换到 "手动关节控制",使用提供的控制装置设置关节位置。
参考 文档 了解更多详情。
其他基本行动
1 查看您的 ROS 图表
使用桌面应用程序, 接通 到正在运行的 ROS 堆栈中。接下来,添加一个 主题图 面板。如果你已经正确连接了 ROS 堆栈,现在就可以在该面板中看到 ROS 节点、主题和服务的计算图。使用面板右侧的控件选择要显示的主题或切换服务。
2 查看和编辑 ROS 参数
使用桌面应用程序, 接通 到正在运行的 ROS 堆栈中。接下来,添加一个 参数 面板。如果你正确连接了 ROS 堆栈,现在应该可以看到当前的实时视图。 玫瑰.您可以编辑这些参数值以发布 rosparam 更新返回 ROS 堆栈。
3 将信息发布回实时 ROS 堆栈
使用桌面应用程序, 接通 到正在运行的 ROS 堆栈中。接下来,添加一个 出版 面板到您的布局中。
指定要发布的主题以推断其数据类型,并用 JSON 消息模板填充文本字段。
在 ROS 常用数据类型下拉菜单中选择一种数据类型,也会在文本字段中填充 JSON 消息模板。
在点击 "发布 "之前,编辑模板以定制您的信息。
